

Bingung cara merakit drone?Begini cara merakit sendiri quadcopter jenis ZMR250

Selamat malam sahabat, sembari berpikir algoritma tentang sistem informasi akademik yang saya buat, saya jadi teringat tentang drone yang pernah saya terbangkan, lebih tepatnya dulu saya pinjam untuk latihan menerbangkan drone nya he he he,...drone yang pernah di publish di https://www.blog.calesmart.com/ atau klik disini dengan inisial sebut saja rizzan. drone ini dengan jenis ZMR250 dengan bahan carbon. bagi pemula, drone itu apa ya?pernah dengar UAV? drone dengan bahasa keren nya UAV (unmanned aerial vehicle) yaitu pesawat tanpa awak yang di kendalikan bisa dengan menggunakan Remote Control ataupun Autopilot. untuk lebih jelas bisa tanya ke mbah google.com aja ya. he he he..
Pada artikel kali ini saya akan menjelaskan cara merakit sebuah quad copter race dengan jenis ZMR250. Dan bagi pemula mungkin masih bingung Mengenai bahan-bahan apa saja yang diperlukan untuk membuat Quad copter. Dan yang perlu diperhatikan adalah dalam memilih bahan yang akan kita gunakan, mungkin saya akan menjelaskan terlebih dahulu tentang cara penentuan bahan yang akan digunakan. Karena di project kali ini saya hanya membuat Quad copter ZMR250 jadi saya hanya akan menjelaskan tentang ZMR250 dan seri 250 lainnya.
Untuk bahan-bahan yang diperlukan dalam membuat Quadcopter sebagai berikut:
1. Frame ZMR250
2. Motor Brushless 2300KV
3. ESC 20A
4. Flight Controller (CC3D)
5. Battery 2200Mah
6. Remote Control
7. Accesoris Tambahan (LED, Camera, Battrey strap, Motor Cover)
Ada beberapa hal yang perlu diperhatikan dalam pembuatan Quad copter:
Disini saya akan menjelaskan satu persatu tentang Part yang digunakan pada Quadcopter
1. Frame

gambar 1 bentuk frame yang terbuat dari carbon
2. Motor Brusless

gambar 2 motor brushless
3. ESC
ESC (Electronic Speed Controller) merupakan sebuah alat yang berfungsi untuk mengatur kecepatan putar motor, dalam hal ini motor brushless. dan ESC yang saya gunakan merk little bee.

gambar 3 ESC dengan arus 20A
4. Flight Control
Flight control merupakan otak dari Quadcopter, dan didalam flight control ini terdapat dua buah chip, yang pertama untuk flight control itu sendiri dan yang satu lagi merupakan chip accelerometer, chip accelerometer ini berfungi sebagai Gyro yang akan menyeimbangkan posisi Copter. kali ini saya memakai FC merk CC3D. karena mudah untuk digunakan.
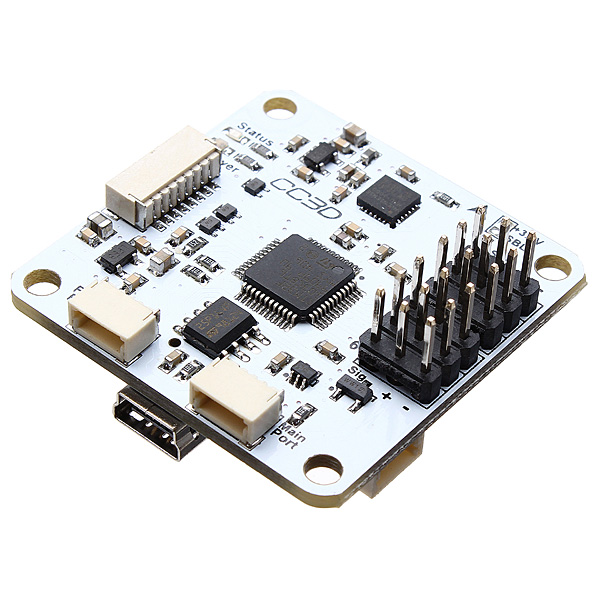
gambar 4 controller dengan merk CC3D
5. Battrey
Dalam pemilihan battrey tentunya kita dibingungkan masalah kapasitas. Untuk mempermudah, Copter ukuran 250 memiliki standar utnuk battrey yaitu kisaran 1500mah – 2200mah. Dan kali ini saya memakai yang ukuran 2200mah.

gambar 5. baterai Li-Po
6. Remote Control
![]()
gambar 6 Remote Control
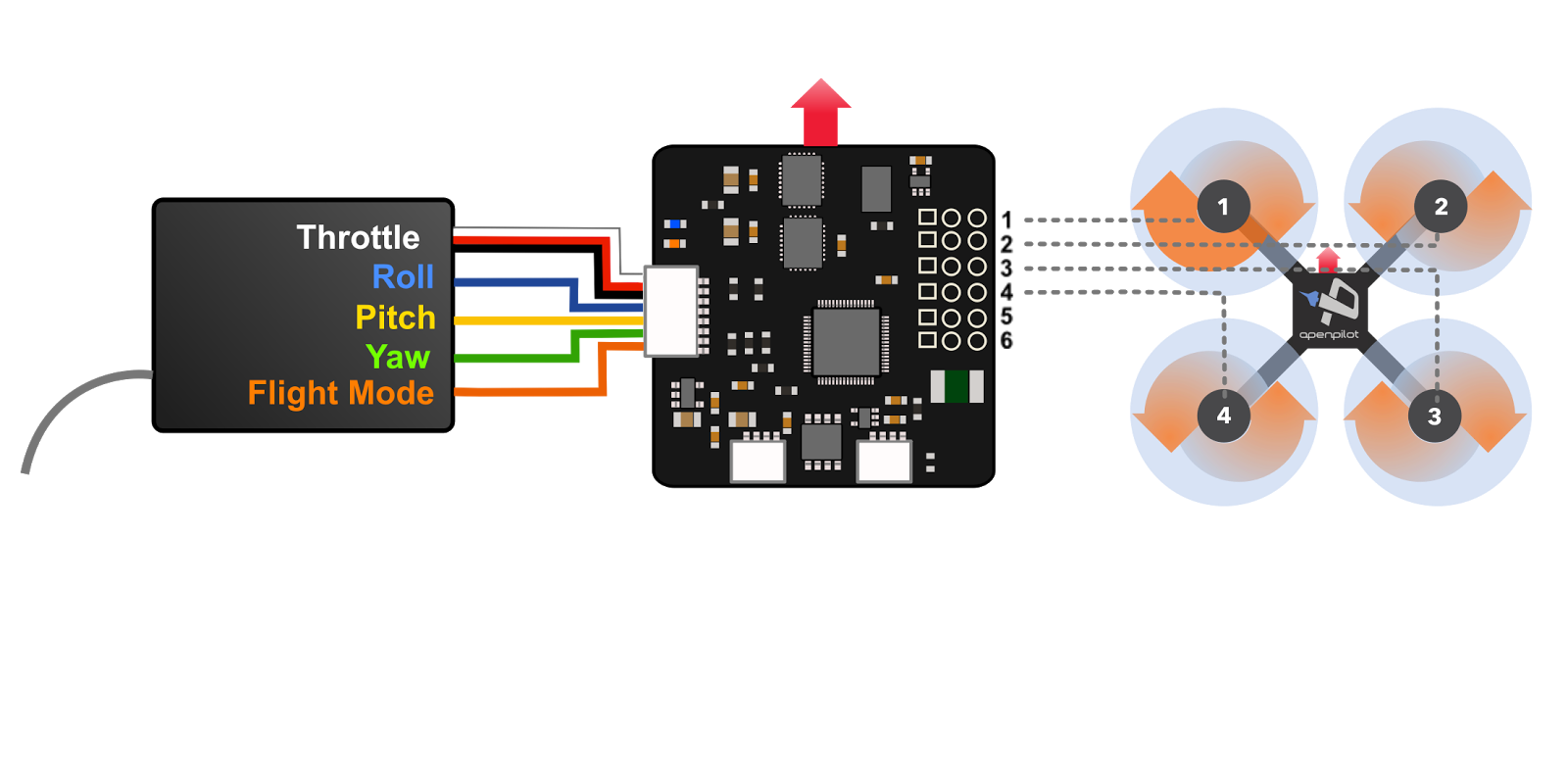
Mungkin bahan utama pembuatan Quadcopter cukup itu aja, sekarang lanjut ke perakitan dan yang perlu diperhatiakan yaitu Wiring Diagram nya. untuk Wiring Diagram CC3D sesuai gambar dibawah
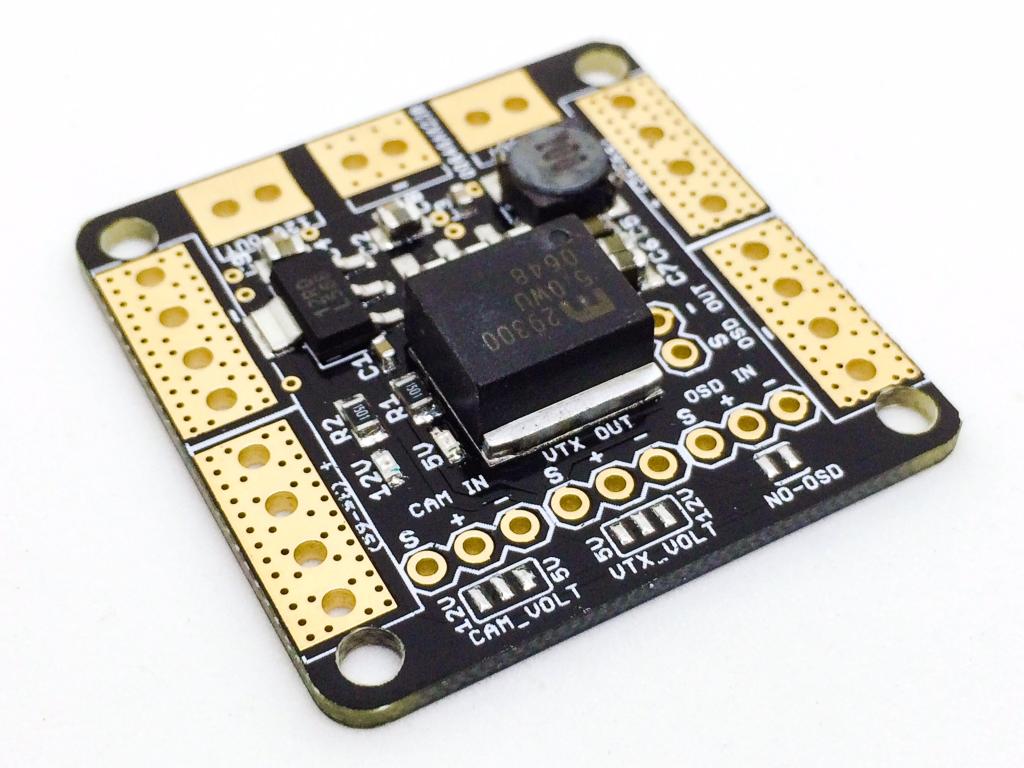
Dan untuk pemasangan pada Frame kita masih mebutuhkan sebuah module PDB (Power Suppy Distributor) karena pada Quadcopter terdapat 4 motor sedangkan battrey yang kita gunakan cuma satu, fungsi lain dari PDB adalah untuk menurunkan tegangan menjadi 5V sesuai kebutuhan CC3D.
Dan gambar dibawah ini untuk Wiring Diagram yang Full Version.

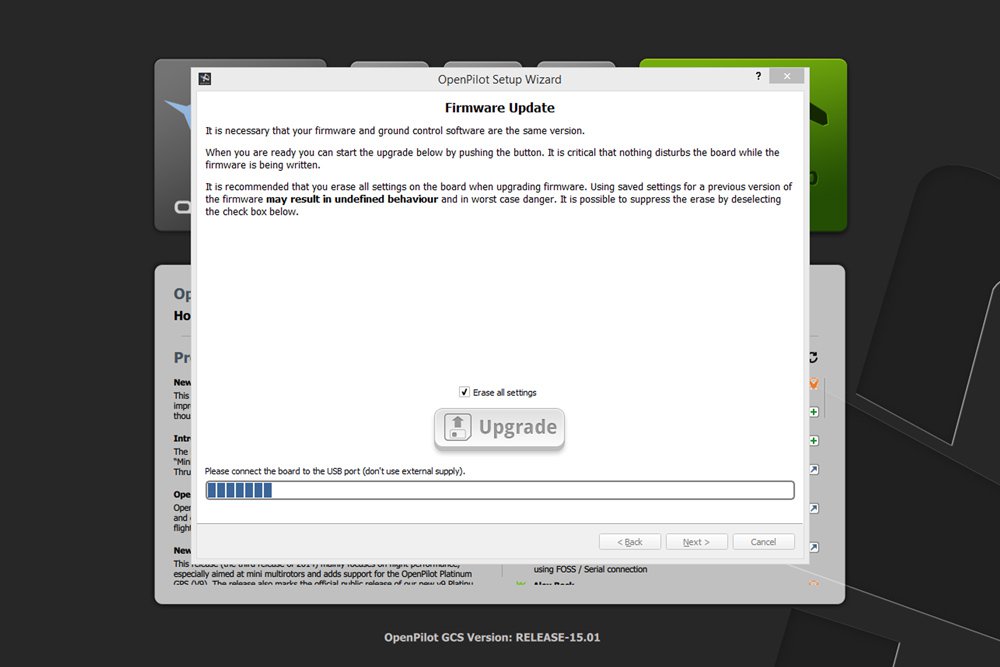
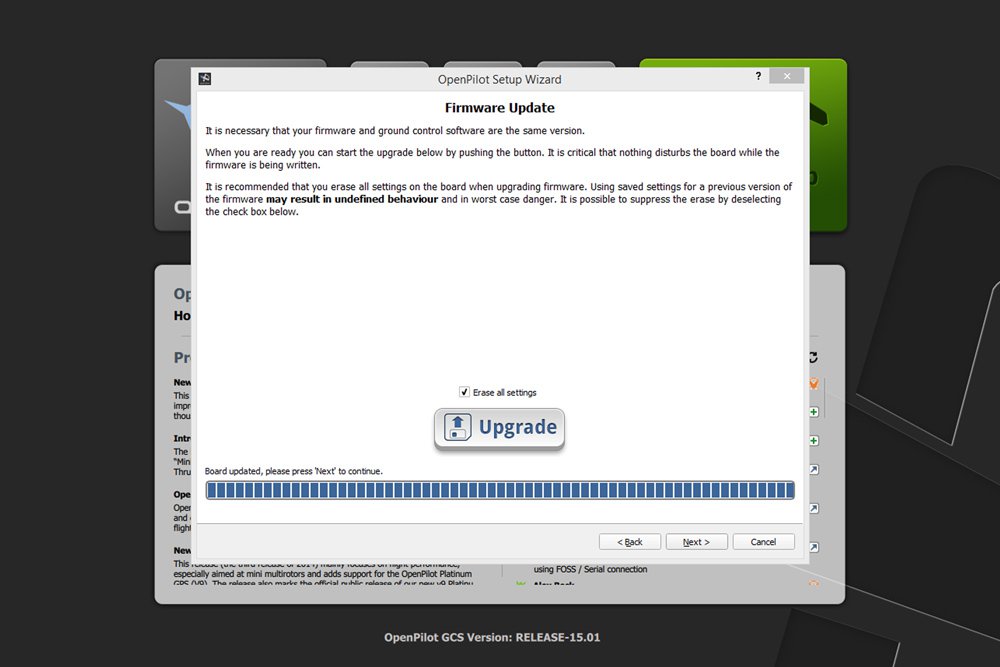
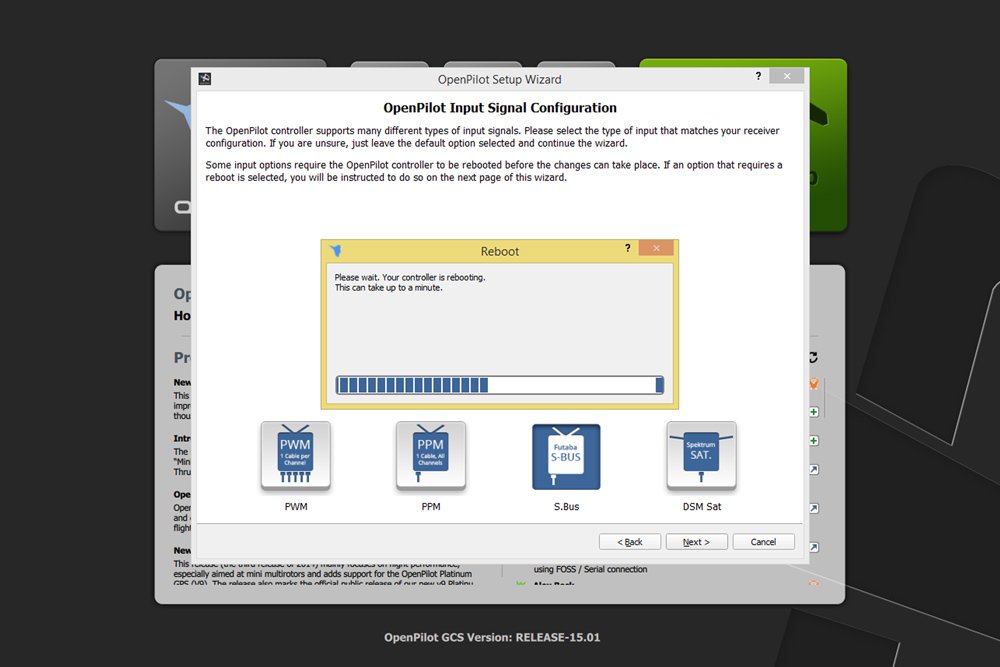
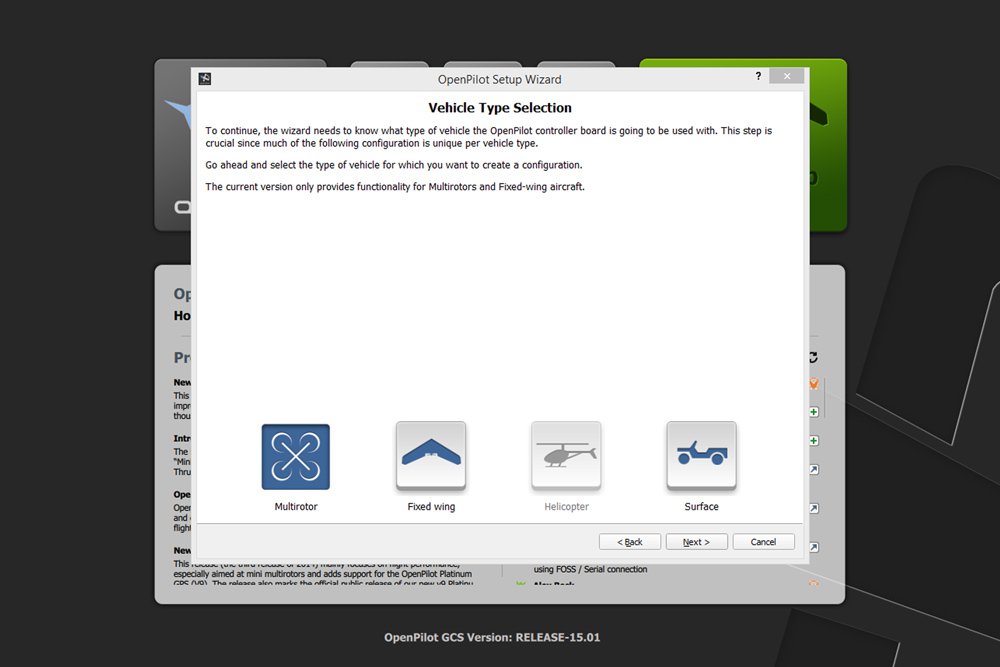
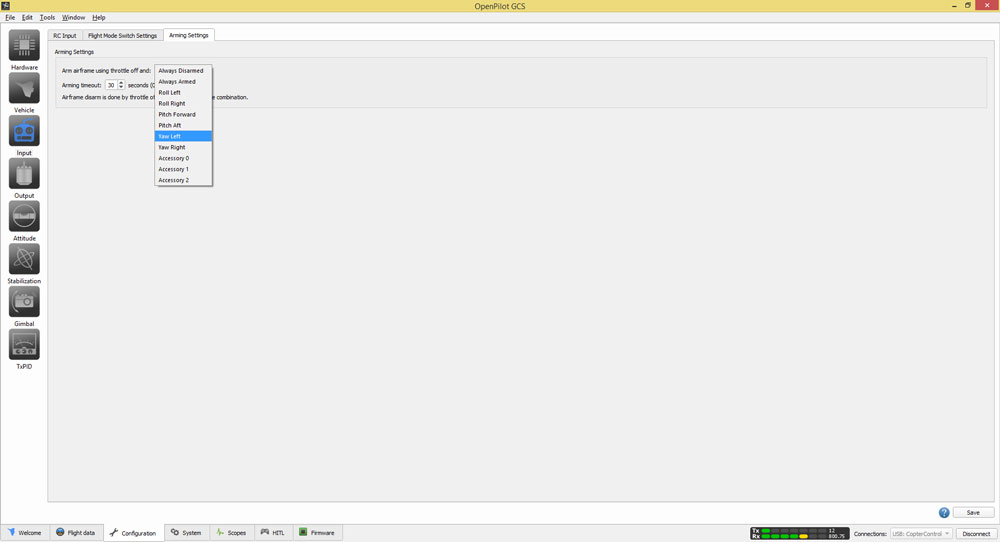
Setelah penyambungan sesuai Wiring Diagram kita lanjutkan dengan pemograman Quadcopter. Untuk aplikasi yang akan digunakan kita menyesuaikan dengan Flight Controller nya, karena CC3D merupakan keluaran dari Open Pilot / Liber Pilot maka kita bisa menggunakan Apliaksi dari salah satu yang telah disediakan oleh produsen. Namun tidak menutup kemungkinan kita menggunakan aplikasi lain seperti Bata Flightatau Clean Flight, Untuk penggunaan aplikasi disesuaikan dengan kebutuhan. Dan kali ini saya menggunakan Aplikasi Openpilot.
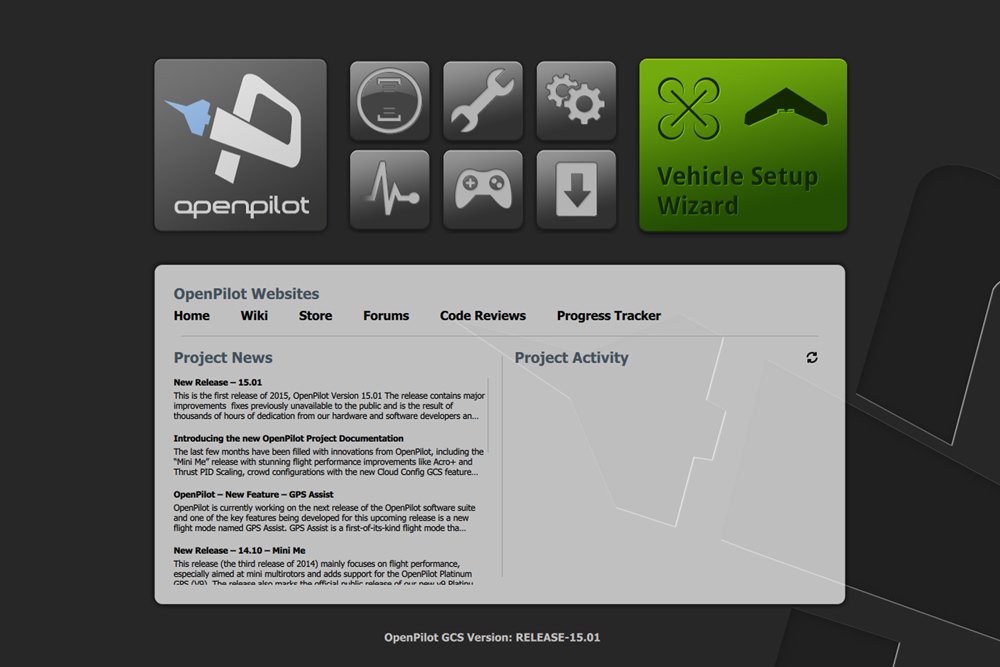
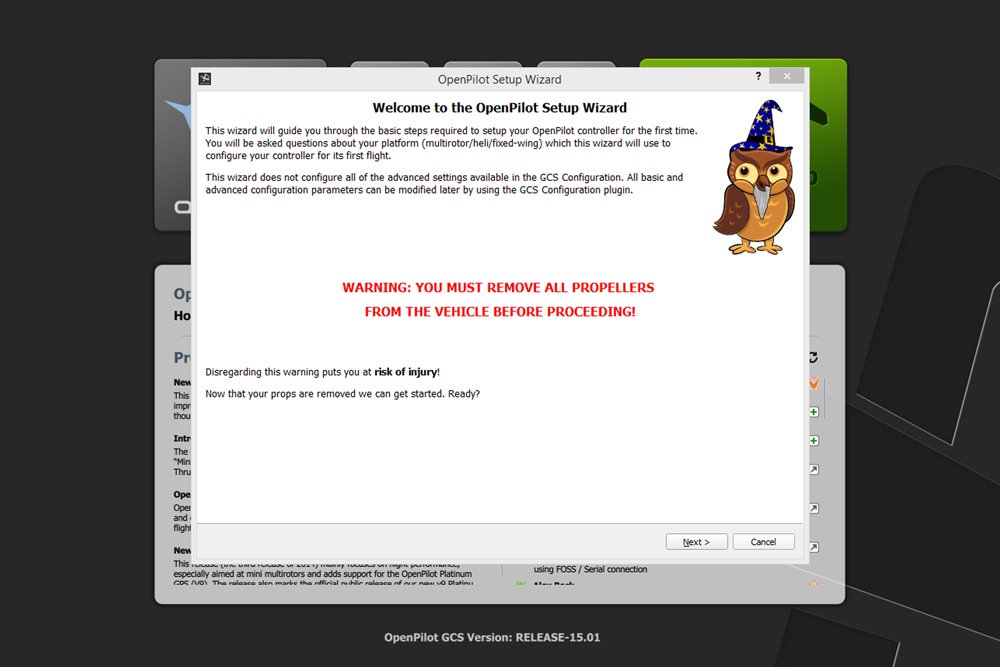
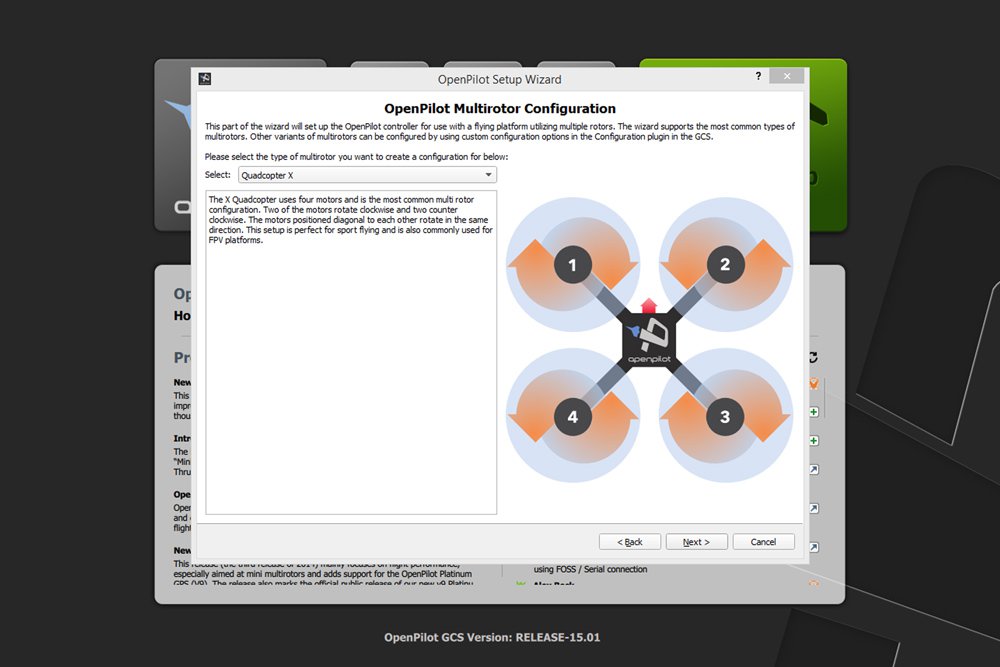
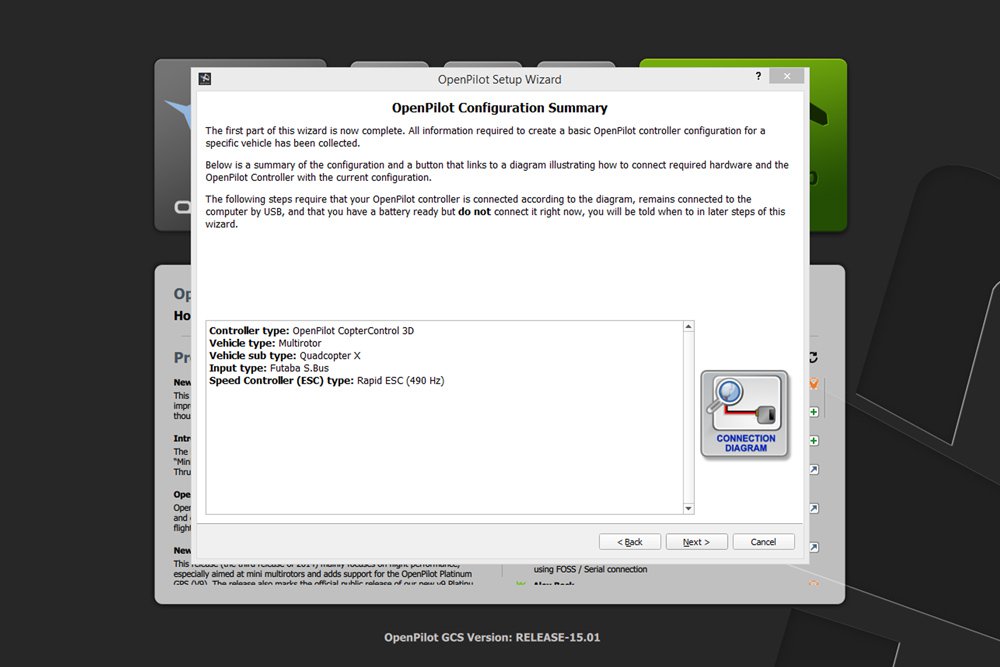
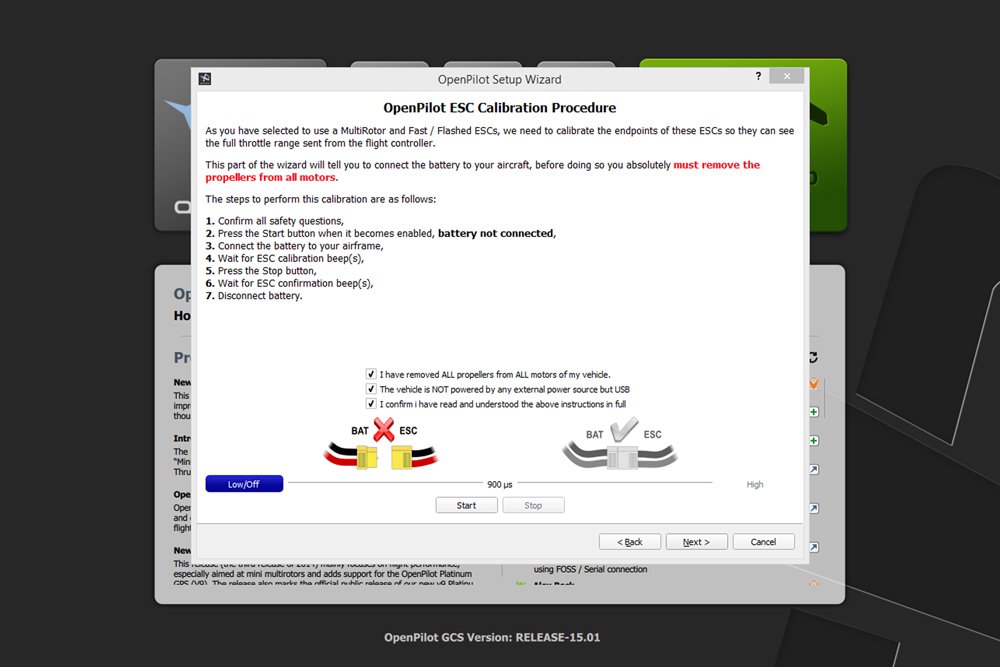
Jika kalian belum mempunyai aplikasinya, kalian bisa mendownload di link yang sudah saya masukkan di postingan ini. Dan jika sudah mempunyai aplikasinya langsung saja kita lakukan configurasinya. berikut ini akan saya lampirkan urutan configurasi menggunakan Openpilot:
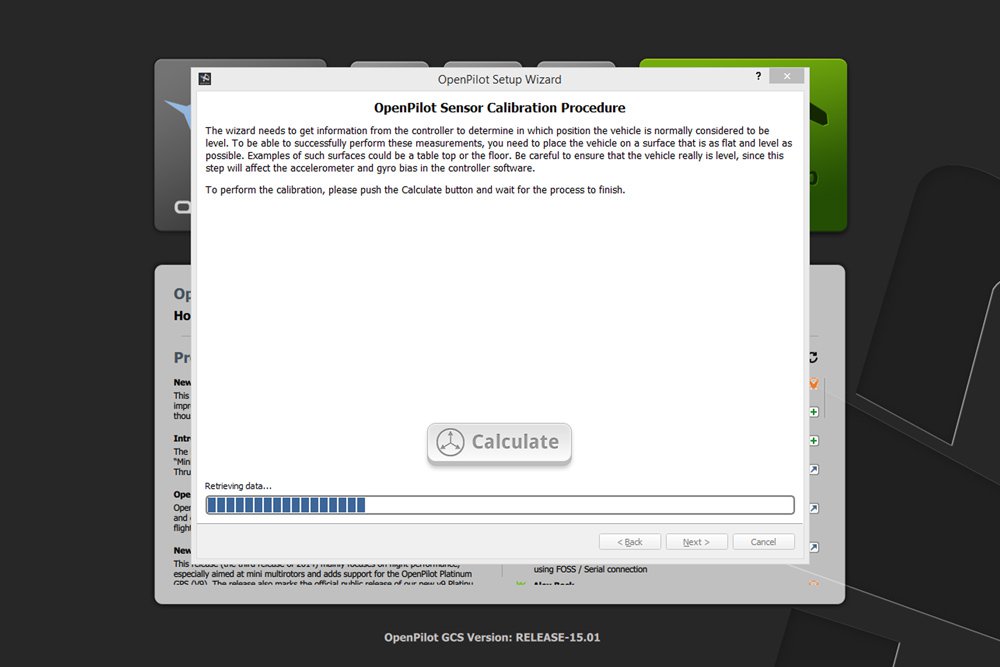
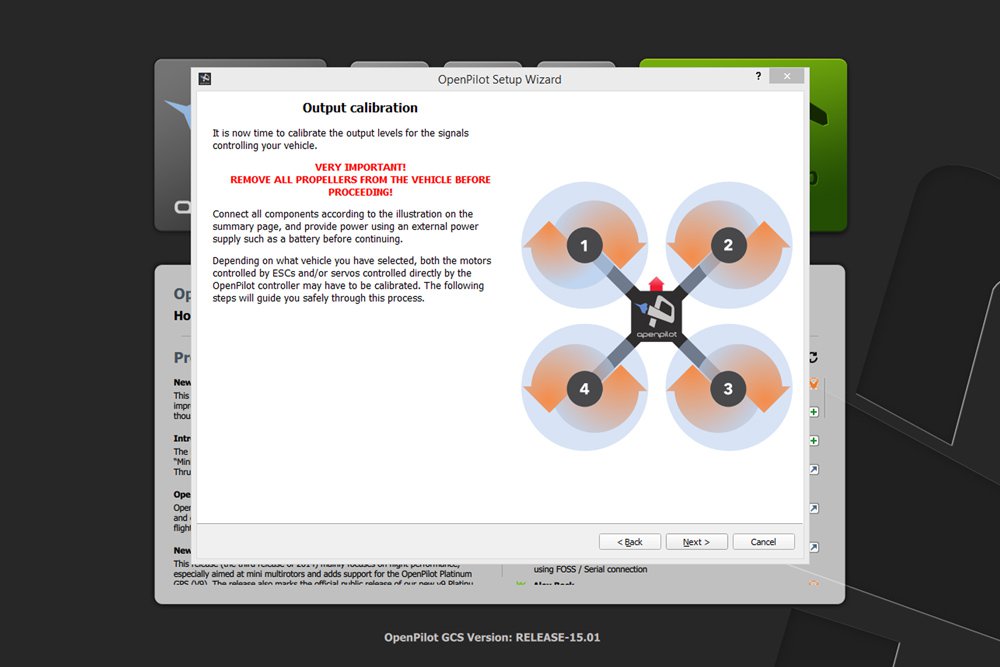
Dalam menyetting Quadcopter diharapkan semua propeller dilepas.




Sebelum melakuakan Calculate posisikan Quadcopter pada tempat yang datar.








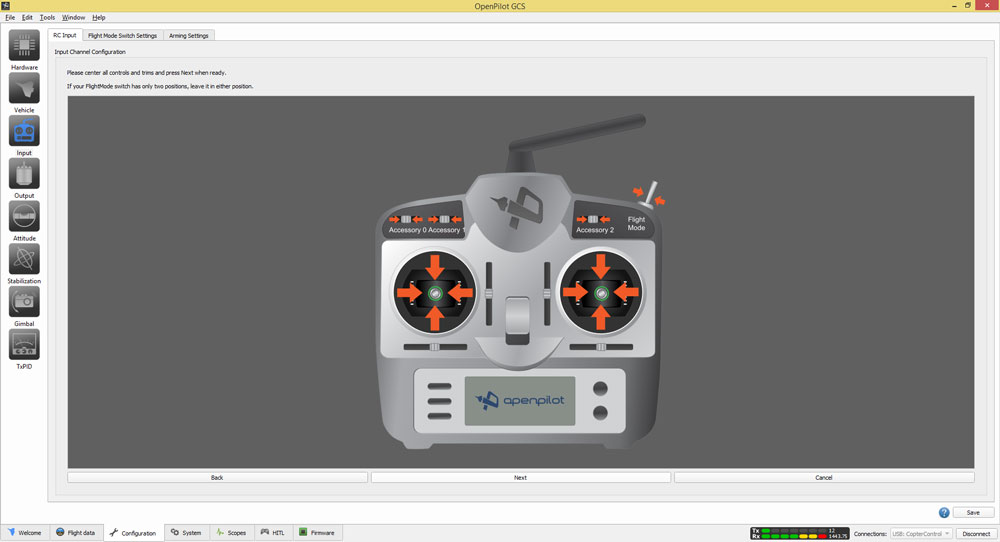


Bagian ini digunakan untuk mengatur Attitude atau sikap Quadcopter sesaui keinginan.
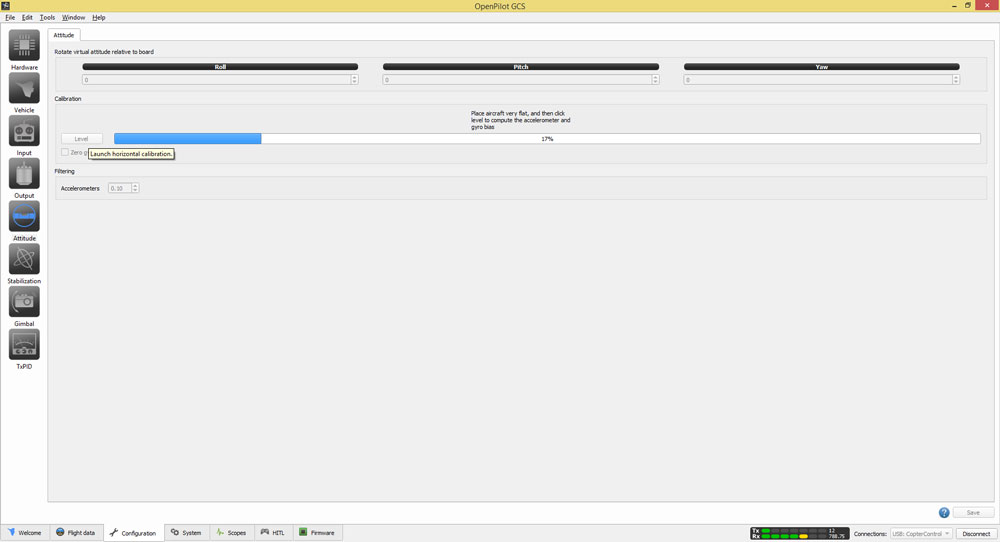
sehingga jika semua sudah berhasil di konfigurasi maka uji coba di ground akan menampilkan sikap dari pesawat tersebut. demikian artikel tentang dasar merakit UAV ZMR250.


















